这种机器人的腿完全复制了猫科动物的腿部形态,而且它有着猫一样的优势:瘦小、轻盈而且敏捷。这种机器人目前处于试验阶段,它将作为研究运动和生物机械学的一个平台使用。尽管这款机器人现在没有头,但是你仍然能够识别出它是什么动物,它明显模仿了猫的动作。洛桑联邦高等理工学院仿生机器人实验室研发的这种机器人,是一种小型的四足动物机器人原型。这款机器人在这个系列机器人中速度最快,它能够在一秒钟内跑出接近7倍体长的距离。
转播到腾讯微博
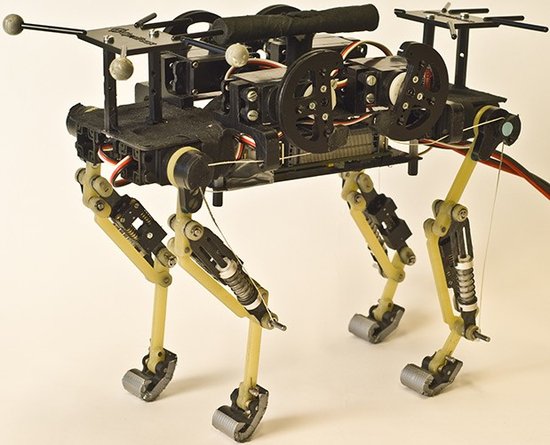
这款机器人的腿部设计完全复制了猫的腿部形态,使它能够像猫一样敏捷的奔跑。
尽管它还不如一只猫敏捷,但是它仍然能够在全速奔跑的过程中保持稳定性。除此之外,它非常轻盈、紧凑并且牢固,完全能够使用廉价和现成的材料装配起来。这款机器人的设计目的是为了鼓励生物机械学领域的研究,最终它将能够进行搜索和救援任务,或者用于探索工作。它的特点在于它的腿部设计,这种设计使它非常迅速而且稳固。。研究人员通过细致的观察,完全复制猫科动物的腿部特征开发出了机器人模型。机器人的每条腿上都分为三节,而且它们的比例完全与猫腿相同。肌腱和肌肉则分别使用弹簧和转换能量的制动器所替代。
仿生机器人实验室的一位科学家Alexander Sprowitz解释道:“这种形态赋予机器人猫科动物所受益的机械特性,也就是说在保证稳定性的情况下,实现奔跑和灵活性。这种机器人因此更具自主性。”据仿生机器人实验室的负责人Auke Ijspeert所说:“这种机器人仍然处于试验阶段,它的最终目标是能够研发出快速、敏捷的机器人用于地面探索,比如说在发生自然灾害的时候进行搜索和救援工作。研究并使用动物王国的法则来开发新的机器人是我们研究的精髓所在。”